Kierownik: Dr hab. inż. Maciej Patan, prof. UZ,
Prof. dr hab. inż. Dariusz Uciński,
Dr hab. inż. Bartłomiej Sulikowski, prof. UZ
Sala 304, budynek A-2
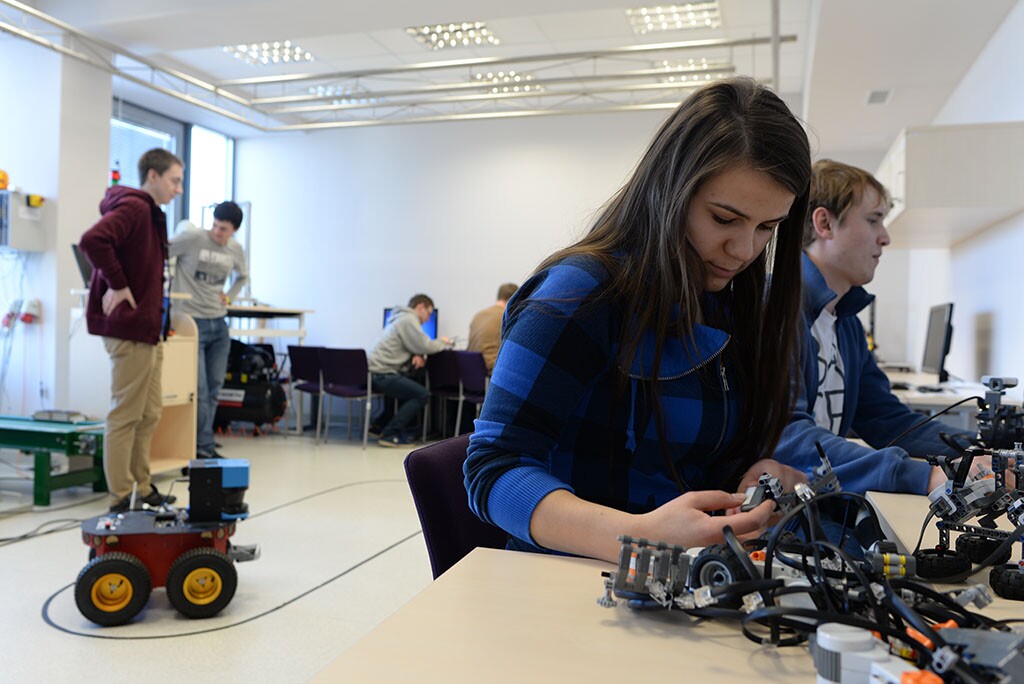
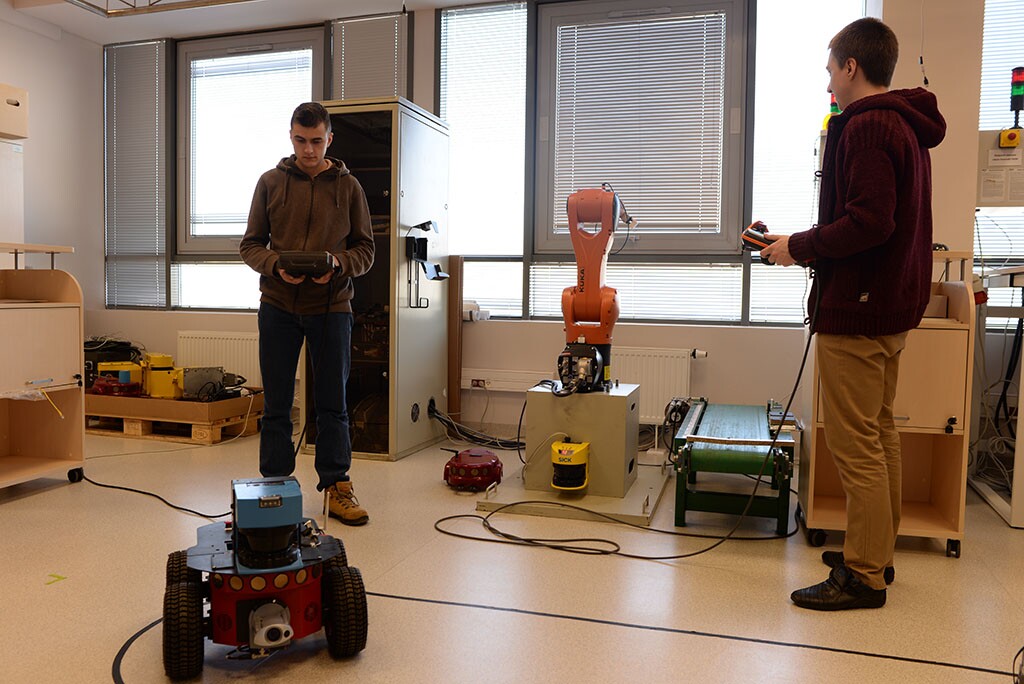
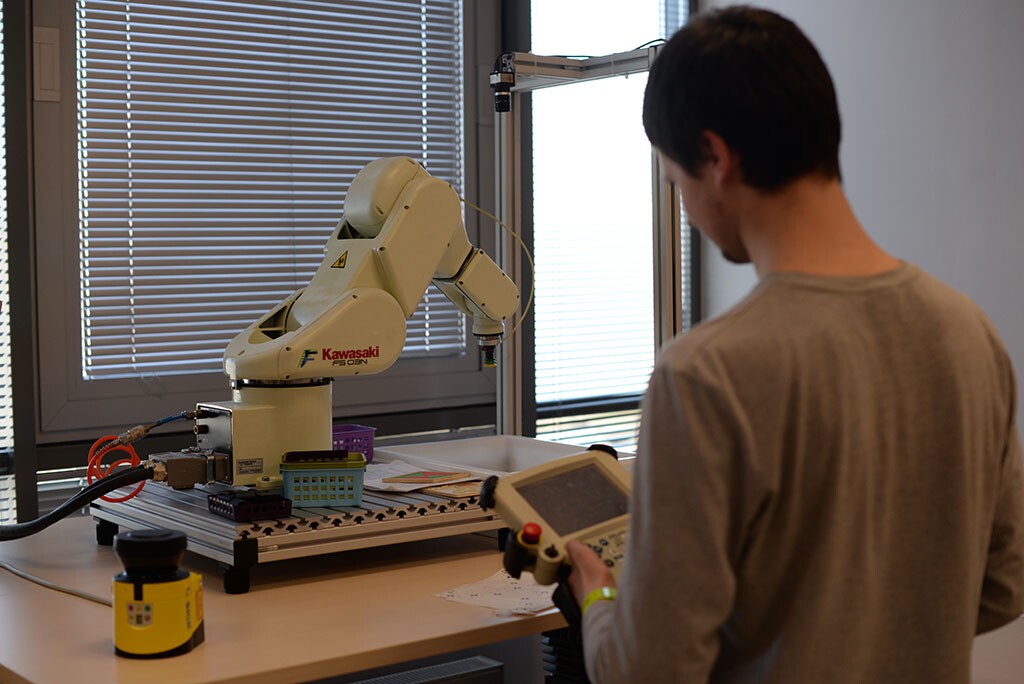
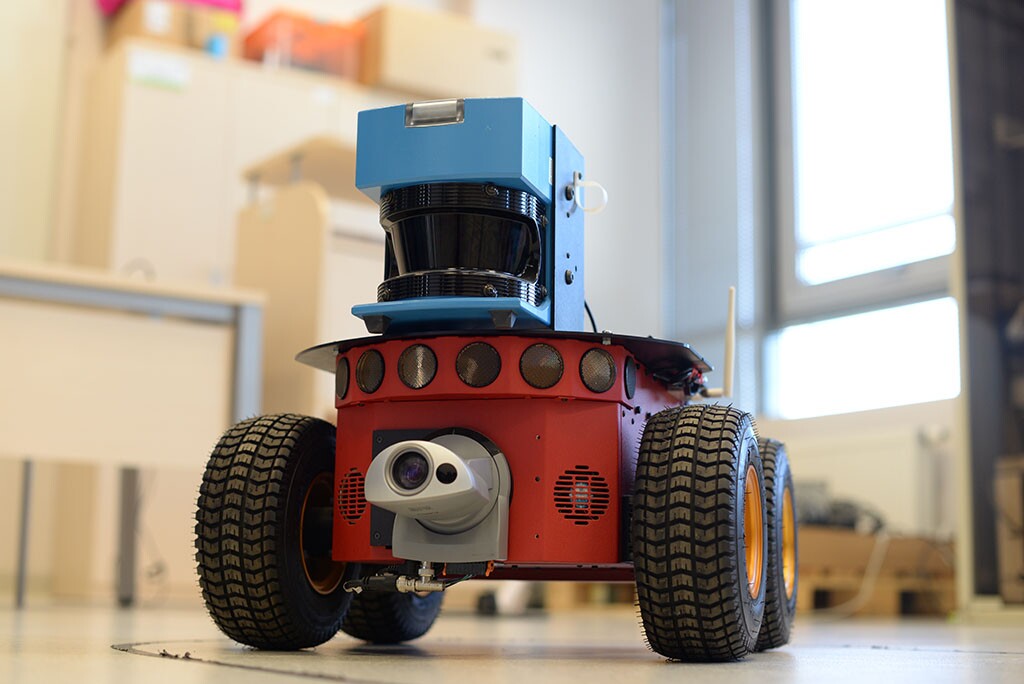
Laboratorium stanowi fundament niezbędny do realizacji badań doświadczalnych oraz dydaktyki z zakresu narzędzi, systemów i algorytmów dla szerokiego spektrum typowych aplikacji związanych zarówno z robotyką klasyczną jak też nowoczesną robotyką mobilną. W zakresie systemów robotyki przemysłowej laboratorium jest wyposażone w zintegrowane stanowiska manipulatorów przemysłowych wraz z systemami bezpieczeństwa, skanerami laserowymi oraz systemami wizji maszynowej. Stanowiska te są uzupełnione w pełni funkcjonalne oprogramowanie do projektowania oraz symulacji aplikacji zrobotyzowanych. Daje to pełnię możliwości doskonalenia umiejętności programowania robotów przemysłowych oraz badań nad nowymi rozwiązaniami z zakresu sterowania robotów oraz integracji robota z systemami sensoryki i bezpieczeństwa. W zakresie robotyki mobilnej laboratorium oferuje dużą różnorodność platform robotycznych prezentujących różne koncepcje lokomocji (zarówno roboty kołowe jak i kroczące), percepcji (sensoryka, laserowe systemy nawigacji, systemy wizyjne), kognicji i programowania (systemy osadzone, oprogramowanie symulacyjne i biblioteki numeryczne). Zapewnia to systematyczne podejście do zapoznania się z metodami nawigacji i lokalizacji autonomicznych mobilnych robotów kołowych oraz kroczących, charakteryzujących się bardzo dużą manewrowością. Wspomniane zagadnienia robotyki nie tylko należą do najnowocześniejszych trendów cybernetyki, ale stanowią gałą bardzo mocno rozwijanych w ostatnich latach inżynierskich systemów wysokiej technologii z licznymi zastosowaniami przemysłowymi (hurtownie mobilne, autonomiczny monitoring), wojskowymi (wykrywanie ródeł skażenia, detekcja ładunków wybuchowych), kosmicznymi (roboty eksploracyjne oraz satelity), społeczno-rekreacyjnymi (roboty asystujące osobom chorym, egzoszkielety, interaktywne platformy informacyjne) oraz wieloma innymi.
W laboratorium:
- poznasz tajniki obsługi i programowania przemysłowych manipulatorów robotycznych,
- nauczysz się projektować przemysłowe systemy bezpieczeństwa wyposażone w skanery laserowe i programowalne sterowniki bezpieczeństwa,
- wdrożysz się w zagadnienia nowoczesnej robotyki mobilnej związane ze sterowaniem, lokalizacją i nawigacją robotów,
- zaznajomisz się z praktycznymi systemami wizyjnymi do zastosowań przemysłowych i mobilnych wraz z metodami rozpoznawania i przetwarzania obrazów,
- uzyskasz dostęp do nowoczesnych i w pełni programowalnych platform robotów jeżdżących i kroczących, które stanowią doskonałe narzędzie dydaktyczno-naukowe do szerokiej klasy problemów cybernetyki,
- poznasz techniki integracji systemów robotycznych wspomaganej funkcjonalnym oprogramowaniem projektowo-symulacyjnym.
Na wyposażenie laboratorium składają się m.in.:
- manipulator przemysłowy Kawasaki FS003N z systemem wizyjnym RFA Vison, skanerem laserowym SICK S300 i sterownikami bezpieczeństwa SICK FlexiClassic - do programowania oraz badania zaawansowanych interakcji robota ze środowiskiem.
- manipulator przemysłowy Kuka Agilus KR900 z systemem wizyjnym, pozycjonerem 1D, skanerem laserowym SICK S3000 i sterownikami bezpieczeństwa SICK Flexi Soft - do badania zaawansowanych aplikacji integratorskich.
- manipulator przemysłowy Fanuc LR200iB Mate - do programowania prostych aplikacji manipulacyjnych,
- symulator programowy K-Roset - do projektowania środowiska pracy, programowania i symulacji dla manipulatorów robotycznych Kawasaki,
- symulator programowy KukaSimPro (10 licencji) - do projektowania środowiska pracy, programowania i symulacji dla manipulatorów robotycznych Kuka,
- Rój 5 kołowych robotów mobilnych Mobile Robots Amigobot - do programowania i badania aplikacji wieloagentowych z wykorzystaniem komunikacji bezprzewodowej,
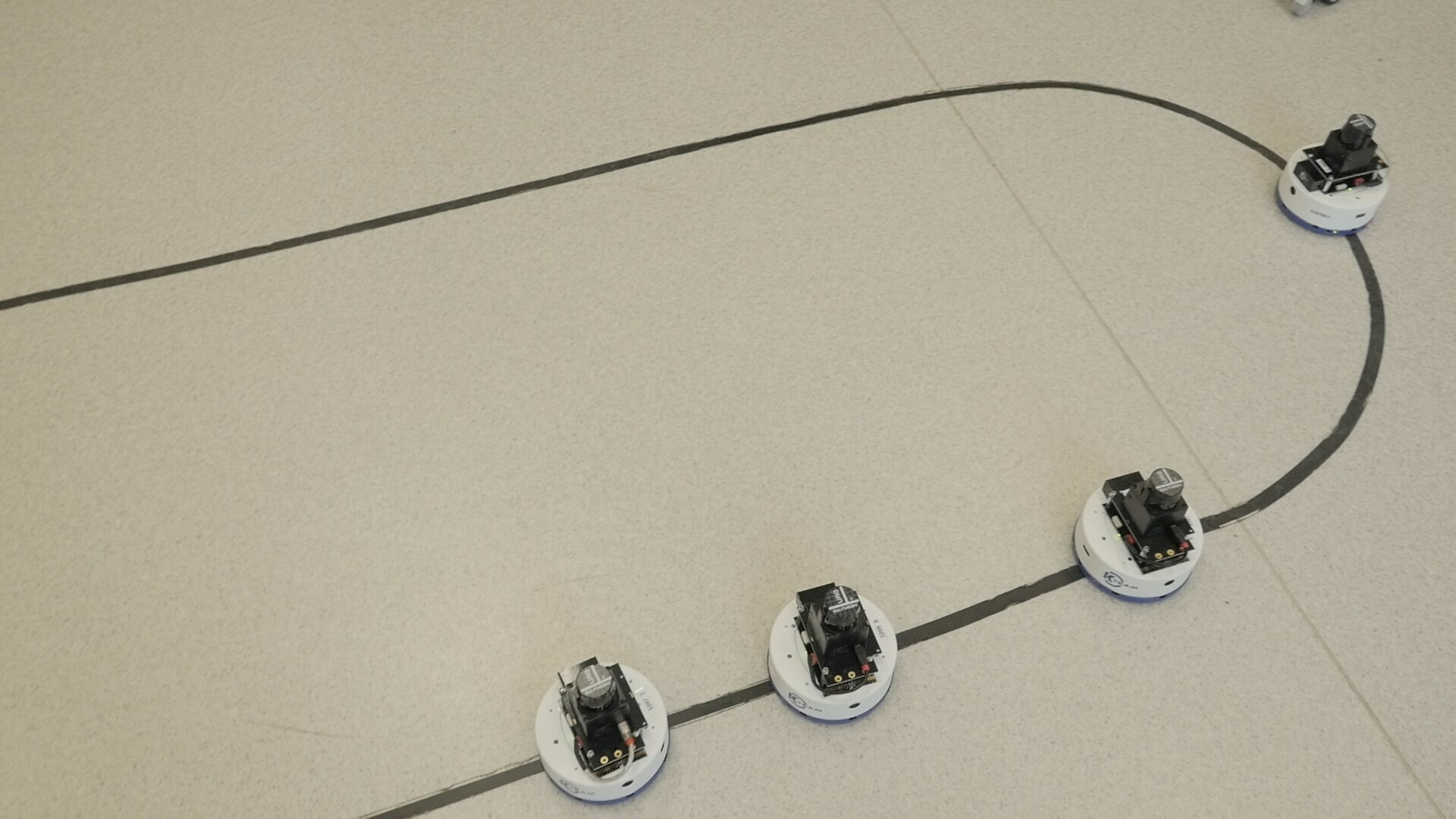
- Rój 10 małych kołowych robotów mobilnych K-Team Khepera IV przeznaczenia uniwersalnego z podstawową sensoryką do realizacji zadań zespołowych opartych na komunikacji bezprzewodowej,
- 3 roboty kołowe Mobile Robots Pioneer 3AT przeznaczenia uniwersalnego do jazdy terenowej na zewnątrz z systemami: nawigacji laserowo-sonarowej oraz wizyjnym; wbudowany komputer pokładowy; licencjonowane oprogramowanie sterujące oraz wizualizacyjno-symulacyjne - do badania zaawansowanych algorytmów nawigacji
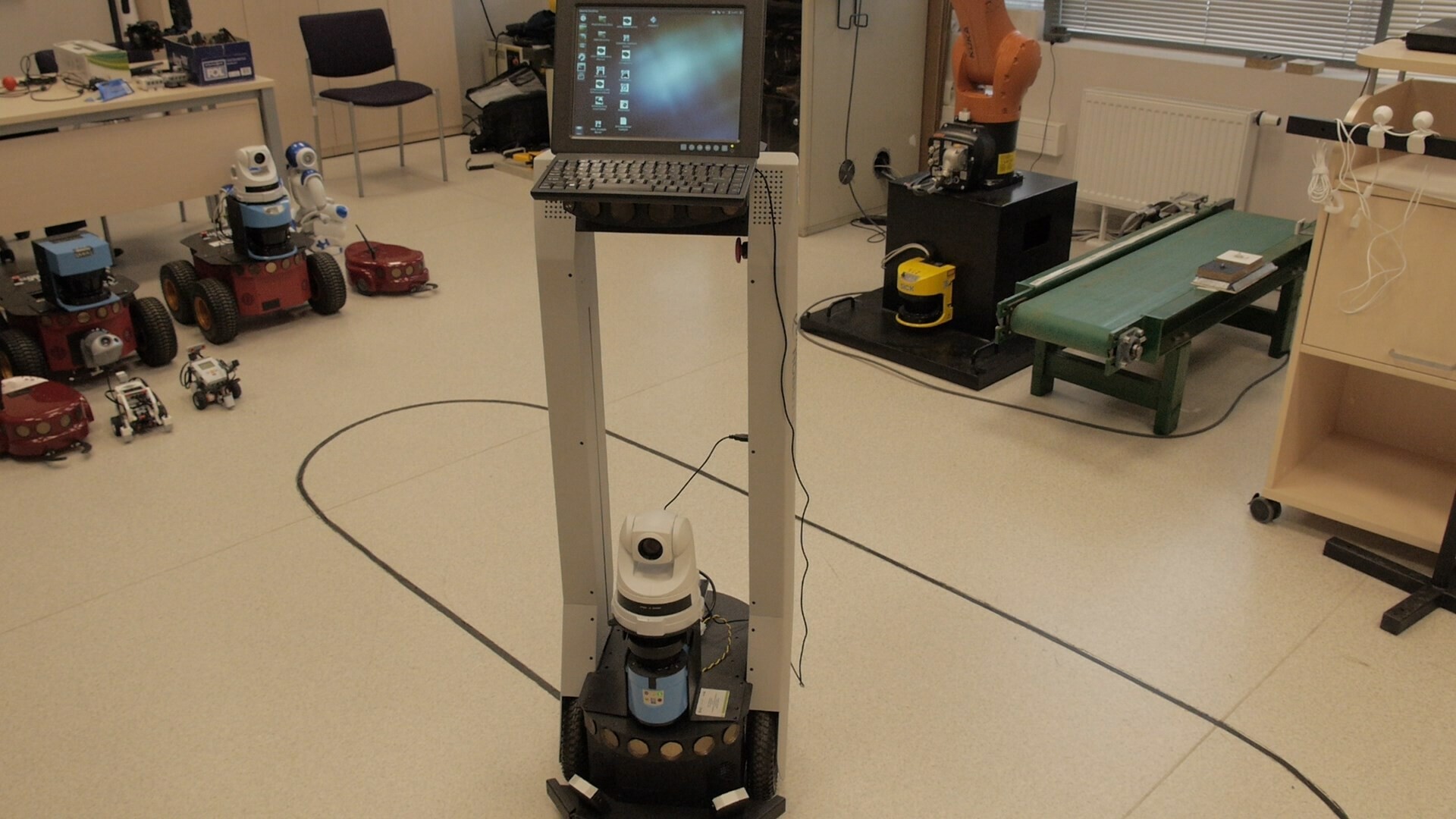
- autonomiczny robot kołowy Mobile Robots PeopleBot z komputerem pokładowym Mamba EBX-37, skanerem SICK LMS 110, kamerą Pan/Tilt/Zoom oraz oprogramowaniem SDK - do realizacji projektów interakcji człowiek-robot,
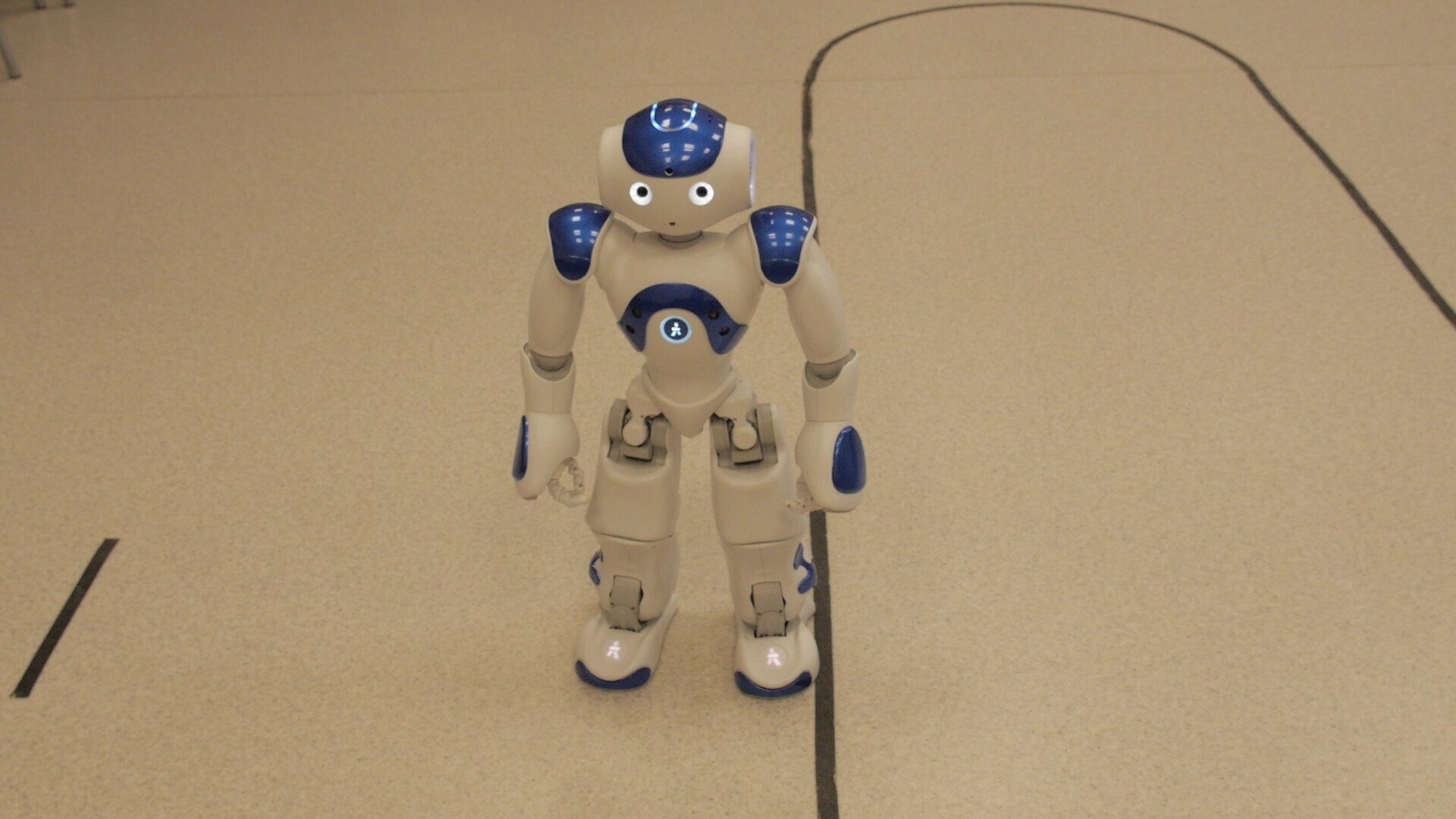
- 3 roboty humanoidalne NAO Aldebaran H25 wyposażone w komputer pokładowy, system wizyjny oraz zaawanowaną sensorykę wraz z licencjonowanym oprogramowaniem do sterowania i wizualizacji - uniwersalna platforma do realizacji zaawansowanych projektów z różnych domen robotyki (interakcja człowiek-robot, systemy wizyjne, programowanie kognitywne, sztuczna inteligencja, sterowanie optymalne, nawigacja i lokalizacja),
- 2 roboty kroczące LYNX Hexapod - do badania kinematyki i dynamiki robotów kroczących,
- Stanowisko - Education real-time target machine Speedgoat - do szybkiego prototypowania i symulacji układów sterowania procesów przemysłowych,
- 2 stanowiska systemów wizyjnych z kamerami NET GigEpro GP1305C GigE Vision z obiektywem VS Technology SV-0814H.
W laboratorium prowadzone są następujące zajęcia:
- Podstawy robotyki
- Sterowanie robotów
- Lokalizacja i nawigacja robotów
- Systemy wizyjne
- Systemy robotyki przemysłowej i robotyzacja